
Now that we are all back in Atlanta, and have had a little rest, I thought I would post a recap of the field trials. Since the sun comes up so early in Anchorage, we set out about 6:00am Wednesday morning and arrived at Byron Glacier trial by 7:30am. While Anchorage is completely devoid of snow, the trail head showed signs of several feet of snow still present. Cold weather gear and snow shoes were required to walk around. The glacier starts about a mile into the trial, which took 45 minutes or longer to walk, encumbered as we were with test equipment, supplies, and a robot.
Once we encountered a likely looking test site, we setup a simple base camp and started bringing the SnoMote online. The major goal of this expedition was to test the remote communication system between the rover and the external science server in Atlanta. Secondary goals included using the rover to perform a local elevation survey, and testing the accuracy of the mapping system. At the base camp location, we performed several variations of both these tests. After three hours of successful testing, we explored further up the glacier path. The melt water from the glacier formed a small stream, and we decided to perform a second round of tests in that area.
During previous seasons of testing, we chartered a helicopter to drop us off at the test site. This was the first over-land trail. Unfortunately, the stress of being transported long distances by hand, and not particularly gently either, led to a failure of one of the front steering linkages. Fortuitously, this actually occurred at the very end of the second round of testing, and did not impact any of the data collection goals. It does mean more work for Monday though, as I fix the broken ski and find a way to improve upon the current design for future missions.
I have posted another short slideshow of highlights from the Byron Glacier trials. You can see our intrepid band of scientists with all our equipment, as well as the SnoMote tackling some icy terrain. Check it out on the right-hand panel.
Sunday, May 9, 2010
Wednesday, May 5, 2010
Finished field testing
We just completed our field tests and are heading back to the hotel.
The trials seem to have been a success; files were uploaded to the
server during the test. The files are being processed by the server,
and should start showing up shortly. I'll make a more in depth post
later, including a slideshow, but for now we are exhausted.
The trials seem to have been a success; files were uploaded to the
server during the test. The files are being processed by the server,
and should start showing up shortly. I'll make a more in depth post
later, including a slideshow, but for now we are exhausted.
Stephen Williams

The day is finally here
> It's 5:30 in Anchorage, the sun has been up for awhile now, we have
> our gear and robot ready to go, and we are headed to Byron Glacier.
> I'll be making posts via cell phone for the day, so they will be
> short (and misspelled).
>
> Stephen Williams
> our gear and robot ready to go, and we are headed to Byron Glacier.
> I'll be making posts via cell phone for the day, so they will be
> short (and misspelled).
>
> Stephen Williams
Saturday, May 1, 2010
Packing Up
 | 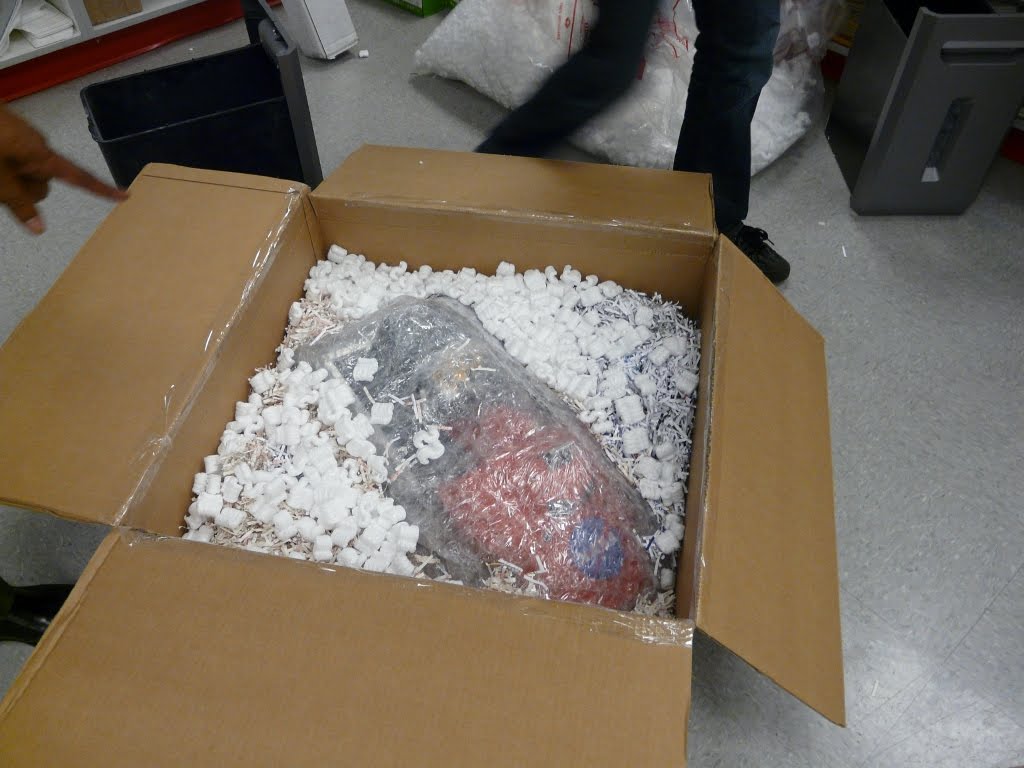 |
As you can see from the pictures, the time has come to pack up the SnoMote and all of our test equipment for transport to Alaska. The front suspension has been disassembled, which makes the SnoMote shorter for packing and shipping, as well as prevents damage to the skis and steering linkages. The SnoMote chassis is then wrapped and packed for the long plane ride.
 Next, we must deal with all of our test equipment. Despite the fact that the robot can drive by itself, we still need a vast array gear for our field tests. A large portion of this is for contingencies. Extra sensors, cameras, and computers are all included. If something were to break while on the glacier, we don't want to have to end the day's testing. Some care has been spent on the placement and accessibility of electronic components, and most can be replaced in the field.
Next, we must deal with all of our test equipment. Despite the fact that the robot can drive by itself, we still need a vast array gear for our field tests. A large portion of this is for contingencies. Extra sensors, cameras, and computers are all included. If something were to break while on the glacier, we don't want to have to end the day's testing. Some care has been spent on the placement and accessibility of electronic components, and most can be replaced in the field.In anticipation of this trip, I've been watching the weather in Anchorage. Either rain or snow was forecasted for basically every day in April. However, the first week of May is scheduled for some sunshine. So hopefully the weather will cooperate. As it stands, the highs should be in the 50's, with lows in the 30's. This is for downtown Anchorage however, and the temperatures around the glacier are significantly cooler. A talk with the park service indicated there was still plenty of snow on the ground, and that snow shoes will be required. They also informed me that this time of year was avalanche season. Field trials are always an adventure.
Tuesday, April 27, 2010
SnoMote Testing
 As the field test of the SnoMote approaches, it is important to first verify all of the hardware and software components are operational in a lab setting. As you can see from the picture, I am in the process of assembling a SnoMote for testing. The circuit board in the back is a Gumstix processor, a low-power computer running a custom version of the Linux operating system. This computer is responsible for controlling the drive motor and steering servo, communicating with the GPS, and logging the science sensor data.
As the field test of the SnoMote approaches, it is important to first verify all of the hardware and software components are operational in a lab setting. As you can see from the picture, I am in the process of assembling a SnoMote for testing. The circuit board in the back is a Gumstix processor, a low-power computer running a custom version of the Linux operating system. This computer is responsible for controlling the drive motor and steering servo, communicating with the GPS, and logging the science sensor data.To check out the driving functions of the rover, I setup a joystick on my computer and transmit the joystick positions to the rover as steering commands. This can be seen in the few seconds of video below.
Finally, the science data communication system has been tested. During the driving functions test, logging was enabled. The SnoMote system periodically checks for network connectivity via a cellular modem. When available, all new log files are transmitted to the web server for use with the "Data Explorer" page. If you check now, there should be a log file available from today, meaning the test was successful. However, as it is currently raining in Georgia, I am forced to do my testing in our lab basement. The GPS signal does not work well down here, so it thinks I am somewhere in Sweden. Oh well.
Monday, April 26, 2010
Site Update
This is just a quick post. I gave the site a face lift. Some cross-platform compatibility issues were fixed, navigation links at the top make sense, and the SnoMote Data Explorer has been better integrated with the site. Overall it just looks better...at least to me.
Tuesday, April 20, 2010
SnoMote Data Explorer
If a mobile weather station were to be deployed in the arctic, one of the issues that will be faced is limited communication. In today's world of e-mail, cell phones, and 3G internet access, it is easy to forget that connectivity can be a major obstacle. In Greenland and Antarctica, communication is accomplished largely by satellite. Depending on the orbit and time of year, opportunities to talk to those satellites could occur as little as once a day. To cope with the limited communication, the SnoMote rovers must store all of the sensor reading locally, then transmit the data packet when possible. Part of the upcoming field tests in Alaska is to test this communication system. While on the glacier, the rover will be given several chances to upload data logs to a remote server here in Atlanta. When that happens, these data files will be immediately viewable. To aid in their viewing, the "SnoMote Data Explorer" site (link on the right) has been created. Simply select one of the available data log files, and a sensor graph will be generated, as well as a small map indicating the location of the rover. A few sample data files from the 2009 field trials have been uploaded to the site already. Feel free to explore.
Monday, April 19, 2010
Background Information
I justed added navigation to some static pages on the right. Currently, there is a link to a fairly detailed description of the SnoMote rover, complete with some pictures and diagrams. Also, during the course of the project, the SnoMotes have received quite a bit of media attention. A page called "In The Press" has links to some of those articles. These include a radio interview at a Juneau, Alaska NPR station and a several minute long spot on Discovery Channel's Daily Planet. I am currently putting together some maps and a timeline of the SnoMote filed tests. That will be posted soon.
Wednesday, April 14, 2010
This is a SnoMote...
 For anyone interested, this is a SnoMote. It is based a 1/8 scale snowmobile chassis, and has been modified to include an embedded computer, GPS unit, camera, accelerometer, and a small suite of weather sensors. Additional modifications include the complete redesign of the rear section to use two tracks, a new motor/drive system, and upgraded front suspension.
For anyone interested, this is a SnoMote. It is based a 1/8 scale snowmobile chassis, and has been modified to include an embedded computer, GPS unit, camera, accelerometer, and a small suite of weather sensors. Additional modifications include the complete redesign of the rear section to use two tracks, a new motor/drive system, and upgraded front suspension.Some pictures from the first field test in Alaska have been uploaded, and should be visible at the bottom.
SnoMote Blog Kickoff
So, this is the kickoff post for the new SnoMote Blog. The SnoMotes are a prototype mobile sensor web designed for collecting weather data in Greenland and Antarctica. This project is being developed by the HumAns Lab group at Georgia Tech. A single SnoMote is being prepared for a field test on Byron Glacier, near Anchorage, Alaska. This blog is intended to chronicle this effort, from some general background on the SnoMote project, to the testing conducted here in Georgia, and finally to the actual field trials on the glacier (hopefully in real-time). So stay tuned...
Subscribe to:
Posts (Atom)


